
中山大学郭裕兰团队:数据充足却训练失败,多智能体到底卡在哪丨CVPR 2026(优化版):多智能体协作的瓶颈与突破之道。随着人工智能技术的不断进步,多智能体系统在现实场景中的应用日益广泛。然而,尽管数据充足,许多多智能体系统在训练过程中仍面临失败的风险。本文将深入探讨中山大学郭裕兰团队在CVPR 2026上提出的新方法MangoBench,以及其在多智能体离线强化学习中的关键发现和突破。通过分析实验结果,我们将揭示多智能体系统在训练中的主要瓶颈,并探讨目标驱动学习如何为这一领域带来新的希望。此外,本文还将介绍团队成员的背景和贡献,展示他们在三维视觉、强化学习和机器人领域的深厚研究基础。最后,我们将展望未来多智能体系统的发展方向,以及这一研究对实际应用的潜在影响。通过这些内容,读者将对多智能体系统的挑战和机遇有更全面的理解。文章将分为以下几个部分:首先,介绍多智能体系统在现实世界中的应用和挑战;其次,详细阐述MangoBench的提出及其核心思想;接着,分析实验结果,揭示多智能体系统在训练中的关键问题;然后,探讨目标驱动学习的优势及其在多智能体系统中的应用;最后,总结研究的意义和未来展望。通过这样的结构,文章将为读者提供一个清晰、全面的视角,帮助他们更好地理解多智能体系统的复杂性和研究团队的创新之处。文章将采用通俗易懂的语言,避免过多的技术术语,使读者能够轻松理解研究的核心内容和意义。同时,文章将结合实际案例,如仓库机器人、自动驾驶和工业机械臂等,展示多智能体系统在现实中的重要性和应用前景。通过这些内容,文章将不仅传达研究的成果,还将激发读者对多智能体系统未来发展的兴趣和思考。此外,文章还将介绍团队成员的背景和贡献,展示他们在相关领域的专业能力和研究热情。通过这些介绍,读者将更全面地了解研究团队的实力和研究方向,从而对他们的研究成果有更深的信任和认可。最后,文章将总结研究的意义和未来展望,强调多智能体系统在现实应用中的重要性,并指出目标驱动学习可能带来的变革。通过这样的总结,文章将为读者提供一个清晰的结尾,帮助他们更好地理解研究的价值和潜力。总之,本文将通过深入分析中山大学郭裕兰团队的研究成果,揭示多智能体系统在训练中的主要瓶颈,并探讨目标驱动学习如何为这一领域带来新的希望。文章将结合实际案例和团队成员的背景,展示研究的广泛影响和潜在应用,为读者提供一个全面、深入的理解。
中山大学郭裕兰团队:数据充足却训练失败,多智能体到底卡在哪丨CVPR 2026
0

最新文章

Kimi K2.6 开源狂飙:58% 涨价背后,月之暗面的终极野心
3分钟前
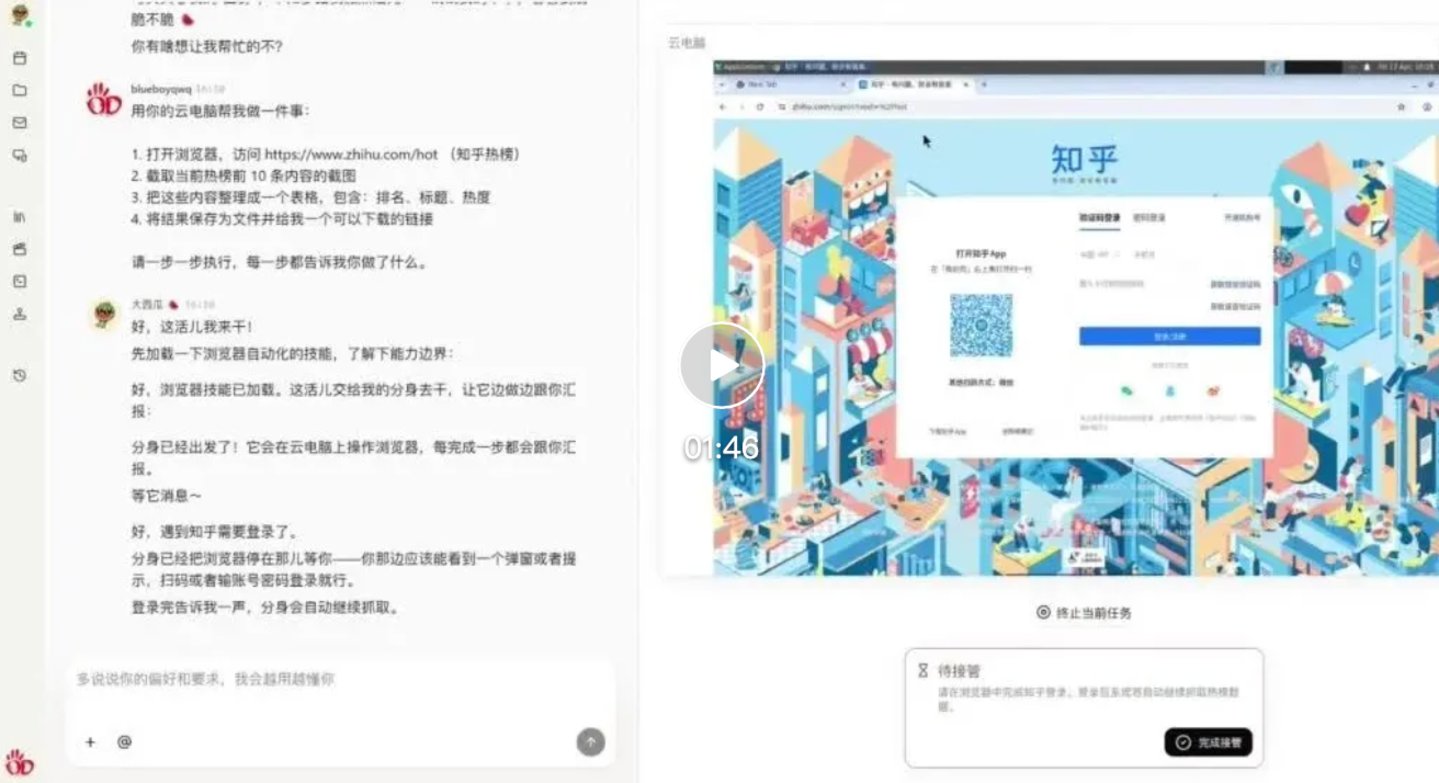
AI代理革命:扣子2.5如何重塑数字身份与工作流?
3分钟前

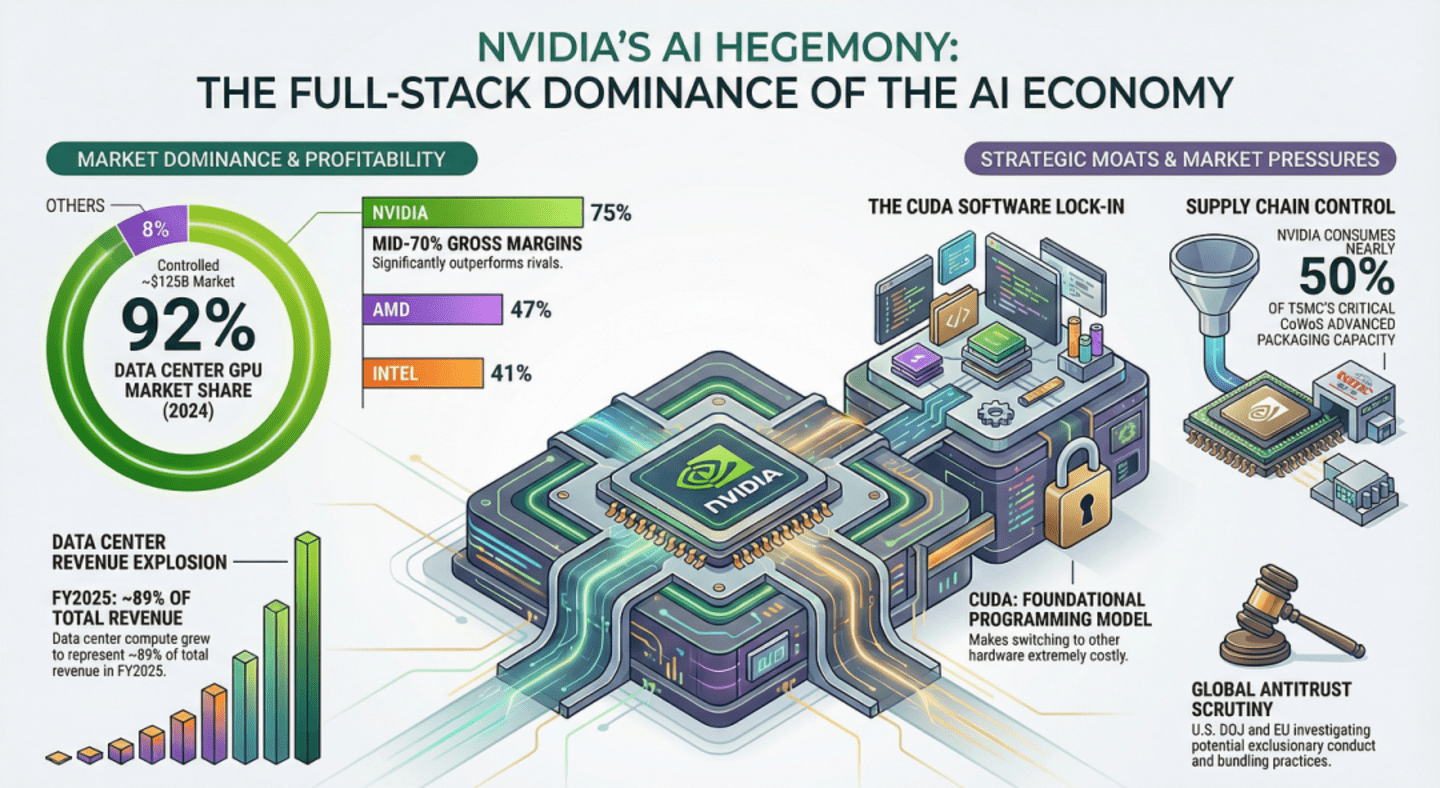
AI帝国兴衰录:2025巨头垄断下的劳工困境与破局之道
5分钟前
DeepSeek V4延期启示:中国AI是走向兼容CUDA还是彻底自立?
6分钟前
2026 AI 产业变局:智能体PC与多模态生成的颠覆性突围
7分钟前
爱奇艺押注AI艺人:是颠覆行业还是触碰红线?
9分钟前
Token争夺战:千问与豆包如何卡位Agent时代的物理入口
9分钟前
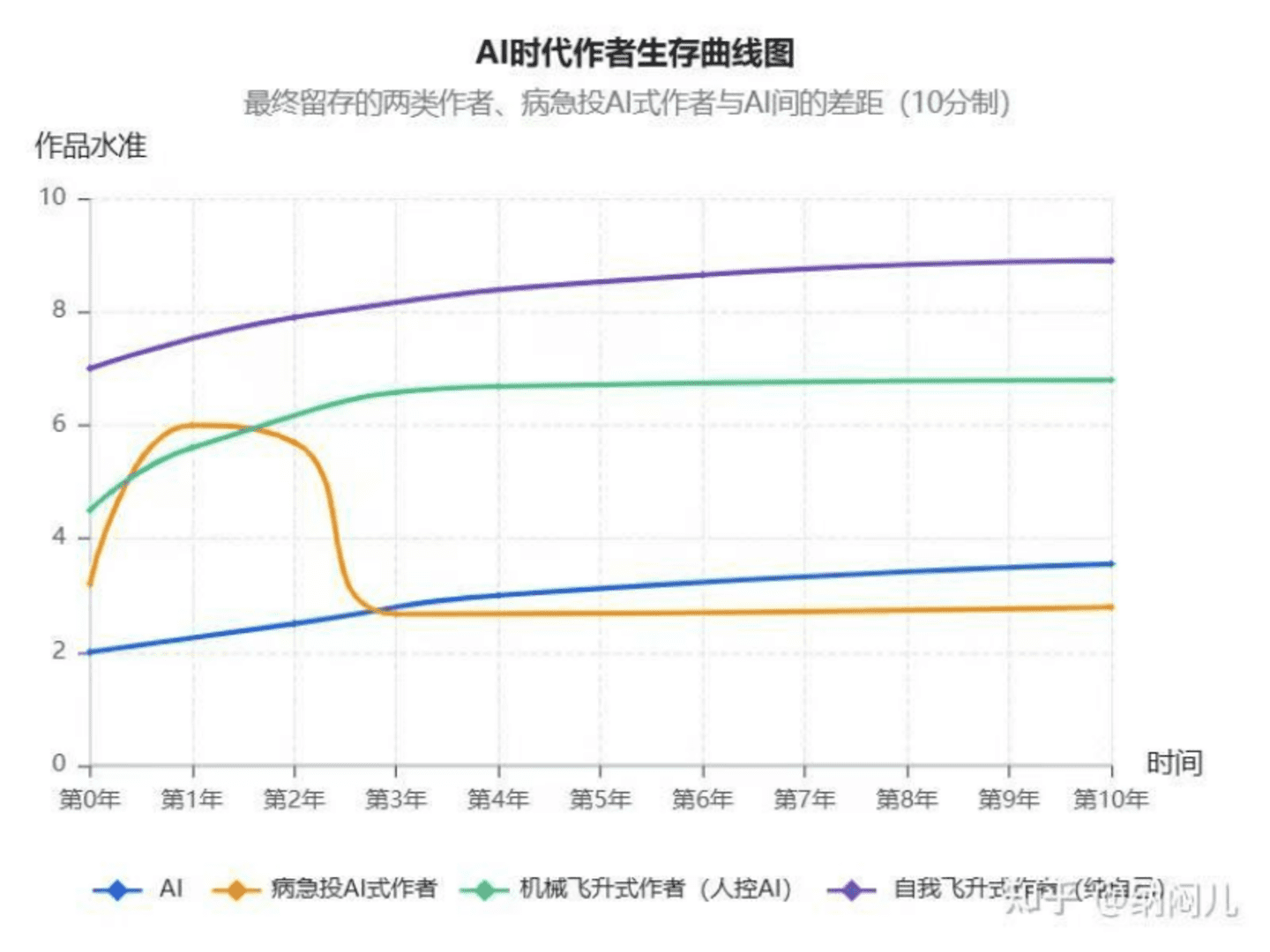
月入80万金番作者AI指令曝光:网文创作边界何处断?
10分钟前
Kimi的破局之困:当技术光环撞上商业重力的极限挑战
12分钟前

谷歌深夜重拳出击:Deep Research Max如何重构企业级研究范式?
12分钟前