技术架构的创新突破
Ctrl-World的核心创新在于其独特的动作条件化架构设计。与传统世界模型仅关注视觉生成不同,该模型将机器人关节角度、夹爪开合度等物理参数作为显式条件注入生成过程。这种设计强制模型学习动作与状态变化之间的因果物理链,从根本上确保了生成内容的物理合理性。
在技术实现层面,模型采用了分层生成策略:底层处理基础物理交互,中层整合多模态感知信息,高层实现复杂任务规划。这种分层架构使得模型能够同时保持微观物理准确性和宏观任务完成度。
物理约束的深度整合
物理引擎约束的嵌入是Ctrl-World的另一大技术亮点。研究团队在训练过程中引入物理引擎监督,将牛顿力学定律转化为生成硬约束。这种约束不仅作用于最终输出,更贯穿于整个生成过程。
具体而言,模型在生成每一帧时都会实时计算物体质量、摩擦系数、碰撞检测等物理参数,确保生成内容严格遵循物理守恒定律。这种深度整合使得虚拟测试结果与真实环境的一致性达到0.986,这在业界是一个突破性的成就。
多视图预测的技术优势
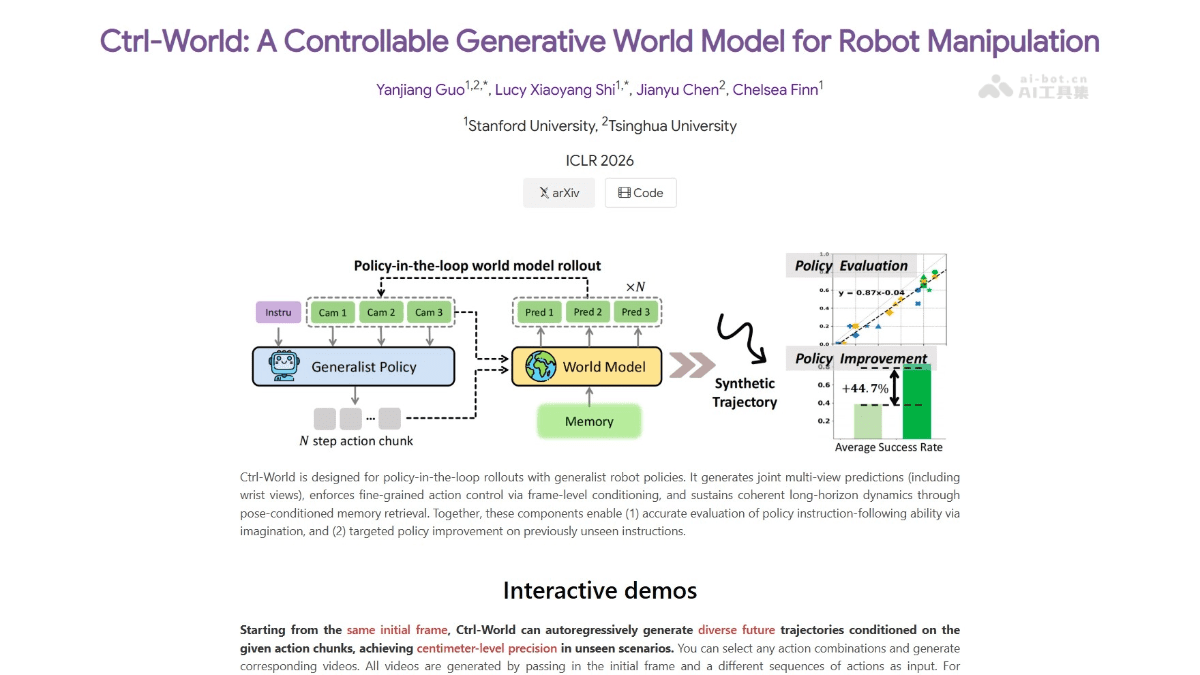
记忆增强的多视图预测技术解决了长时序一致性的技术难题。通过稀疏历史帧检索机制,模型能够有效维持长时间序列的连贯性。姿态条件化投影技术则确保了多视角生成的一致性。
这项技术不仅生成RGB视频,还同步输出深度图和点云结构,为机器人提供完整的3D空间认知能力。实验数据显示,模型在轨迹精度方面达到厘米级,深度准确性达到0.93,这为精密操作任务提供了可靠的技术支撑。
应用场景的全面覆盖
在虚拟仿真测试领域,Ctrl-World的革命性意义在于其高保真度。开发者可以直接在虚拟环境中测试机器人策略,评估结果与真实物理环境高度一致。这不仅大幅降低了研发成本,还显著缩短了测试周期。
策略训练数据合成是另一个重要应用方向。传统合成数据往往存在"虚拟训练、真实失效"的问题,而Ctrl-World生成的物理合理数据可直接用于真实机器人训练。这种能力在数据稀缺场景下尤为重要。
动作规划与闭环控制方面,模型展现出卓越的精密操作能力。无论是抓取、堆叠还是插入任务,Ctrl-World都能生成精准的动作序列,并在执行过程中根据实时反馈进行动态调整。
机器人技能学习受益于模型生成的多样化场景数据。通过暴露于大量虚拟但物理合理的交互数据,机器人能够学习到泛化性强的操作技能,更好地适应未知环境。
技术实现的细节剖析
从技术实现角度,Ctrl-World采用了分布式训练策略。研究团队设计了专门的损失函数组合,包括重建损失、物理约束损失、多视角一致性损失等。这种多目标优化确保了模型在各个维度上的性能平衡。
在模型架构设计上,团队创新性地将transformer结构与物理引擎进行深度融合。这种设计既保持了深度学习模型的表达能力,又确保了物理规律的严格遵循。
训练数据的处理也体现了技术创新。团队开发了自动标注 pipeline,能够从原始视频数据中提取精确的动作参数和物理状态信息。这种自动化流程大大提升了训练效率和数据质量。
性能评估的严谨性
WorldArena评测结果的权威性建立在严格的评估标准之上。评测涵盖了多个维度,包括轨迹精度、物理合理性、任务完成度等指标。Ctrl-World在这些指标上的优异表现证明了其技术成熟度。
特别值得注意的是策略评估一致性指标。0.986的一致性分数意味着虚拟测试几乎可以完全替代真实测试,这对机器人研发流程具有颠覆性意义。
未来发展的潜力
从技术发展角度看,Ctrl-World代表了具身智能领域的重要里程碑。其成功验证了物理约束与深度学习结合的技术路线可行性。未来,这一技术框架有望扩展到更复杂的场景和任务类型。
在产业化应用方面,Ctrl-World的技术优势可能推动机器人研发模式的根本性变革。虚拟测试成为主流方法后,机器人开发的门槛将显著降低,创新速度将大幅提升。
技术影响的深远意义
这项技术的意义不仅限于机器人领域。其核心思想——将物理规律深度整合到AI模型中——可能对整个人工智能发展产生深远影响。这种"物理感知AI"的理念有望在更多领域得到应用。
从科研方法论角度,Ctrl-World的成功展示了跨学科合作的重要性。计算机视觉、机器人学、物理学等多个领域的知识融合,创造了这一突破性成果。
实际部署的考量
在实际部署过程中,团队特别注重模型的实用性和可扩展性。模型支持多种机器人平台和传感器配置,具有良好的适应性。同时,开源策略确保了技术的广泛传播和持续改进。
性能优化方面,团队采用了模型压缩和加速技术,确保在保持精度的同时满足实时性要求。这些工程优化使得Ctrl-World能够在实际应用中发挥最大价值。