近期,OpenClaw开源项目在全网掀起现象级热潮,"养龙虾"式的创新AI交互玩法快速破圈,点燃了开发者与科技爱好者的热情。从目前的发展情况来看,围绕OpenClaw的探索,仍主要集中在数字世界,例如文档处理、数据整理等典型任务。而能够延伸至真实物理环境、完成实体交互的产品,仍然较为少见。
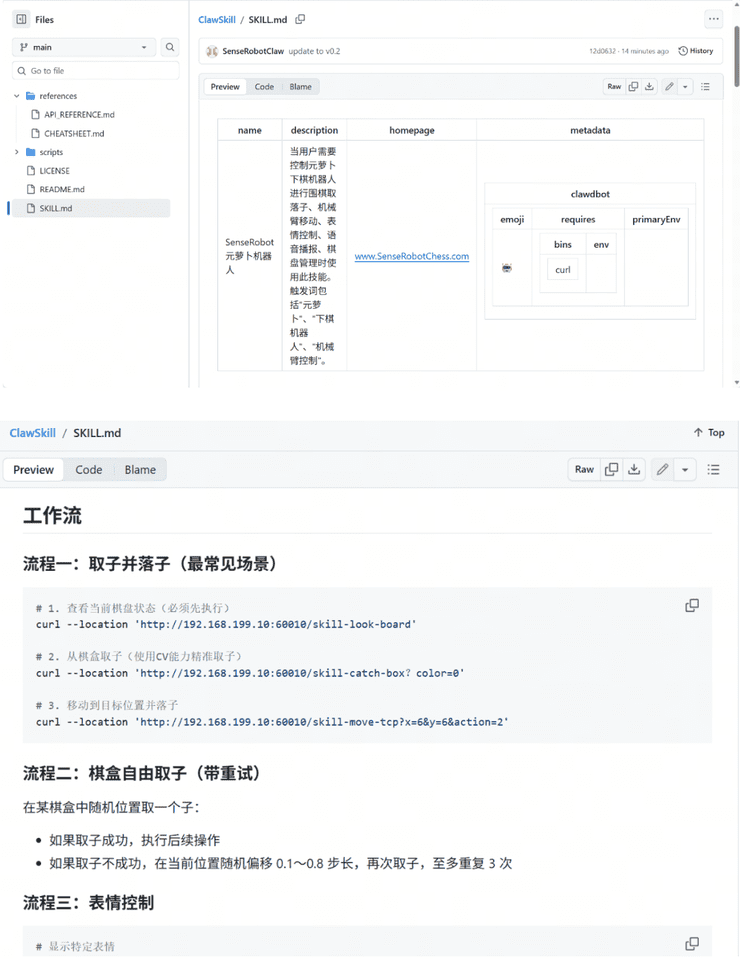
在这样的背景下,具备"实体交互"能力的产品开始受到关注。其中,商汤科技旗下的元萝卜,因开放了OpenClaw skill接口,被开发者尝试用于探索AI在真实世界中的执行能力。
依托其视觉感知与实体交互能力,元萝卜被视为少数同时实现量产落地、并具备实体交互能力的代表性产品之一。这也让业内开始重新审视元萝卜的角色——它有机会从"下棋机器人",延展为更具通用能力的"桌面智能体"。
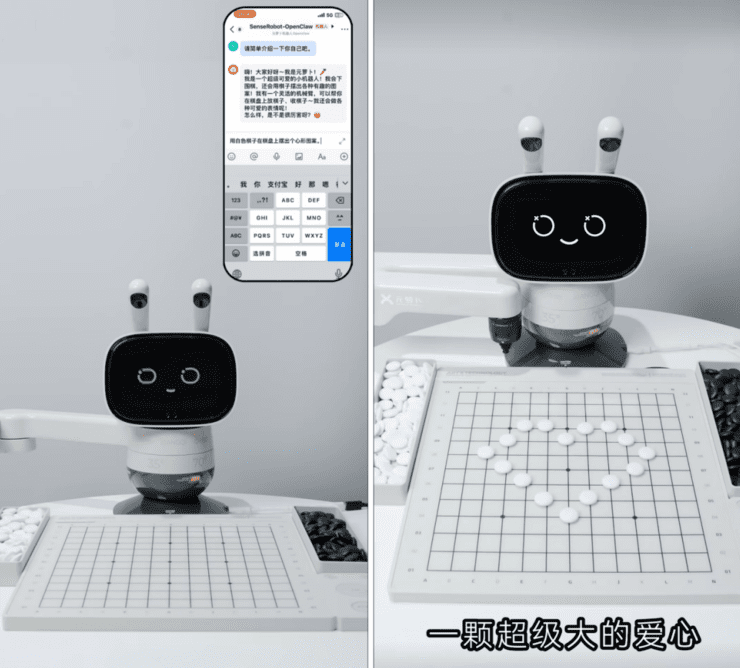
在2026年中国家电及消费电子博览会(AWE)期间,结合OpenClaw的设想,已经勾勒出元萝卜潜在的路径可能:通过简单指令驱动机械臂完成抓取、摆放,甚至让棋子组合成特定图形。除此之外,还有机会进一步延展至桌面自动化、互动展示或AI实验等场景,使AI从"生成内容"走向"参与动作",改变物理世界。
技术架构解析
当前,大模型能力快速飞跃、智能体功能不断进化,但绝大多数AI应用仍局限于屏幕内的虚拟交互,难以与真实物理世界开展交互。
元萝卜恰好具备实现物理世界交互的基础——依托商汤科技在计算机视觉领域的深厚积累,通过高精度摄像头与AI算法的配合,它能够实时感知桌面环境、识别物体位置、判断空间关系,做出智能决策,并引导机械臂安全完成实体交互。
这使得OpenClaw与元萝卜的结合与多数仍停留在屏幕内的AI应用不同:虚拟指令能够转化为真实动作,实现从"指令-感知-决策-执行"的完整闭环。借助元萝卜成熟的硬件能力,AI可以从识别物体位置,到完成抓取和摆放,真正从"虚拟交互"跨越到"物理执行"。
应用场景拓展
此次与OpenClaw的深度融合,展现了元萝卜从"会下棋的机器人"向"桌面智能体"进化的潜力。
开发者、学生、创客以及科技爱好者可利用OpenClaw的自然语言交互能力,探索元萝卜在真实环境中的操作可能。除了基础的下棋功能外,其应用场景正在不断扩展:
- 教育编程场景:学生可以通过自然语言指令控制机械臂完成物理实验操作
- 创客项目开发:开发者可以快速验证硬件原型的设计方案
- AI实验平台:研究人员能够进行实体环境下的智能体行为测试
- 互动展示应用:博物馆、展览馆等场所的智能化互动体验
技术挑战与突破
实现可靠的实体交互面临多重技术挑战。首先是环境感知的准确性,元萝卜需要精确识别桌面物体的位置、形状和材质特性。其次是运动控制的精准度,机械臂需要以合适的力度和角度完成抓取动作。最后是安全性的保障,避免在交互过程中对人或环境造成损害。
元萝卜在这些方面取得了显著突破:其视觉系统能够达到毫米级的定位精度,机械臂具备力度反馈和防碰撞机制,整体系统响应时间控制在毫秒级别。这些技术指标为实体交互的可靠性提供了保障。
开源生态价值
OpenClaw开源项目的价值不仅在于技术本身,更在于其建立的开发者生态。通过开放接口和标准化协议,降低了实体交互技术的入门门槛。开发者无需深入了解底层硬件细节,就能通过自然语言指令控制机械臂完成复杂任务。
这种"开发者主导、生态驱动"的模式,为家用AI设备的应用边界提供了新的参考。随着更多开发者的加入,元萝卜的功能边界将持续扩展,形成良性的创新循环。
未来发展趋势
随着机器人技术走向更多应用场景,以及开源生态的不断完善,AI智能体将进一步打破虚拟与现实的边界。具备实体交互能力的消费级终端将成为AI能力触达普通用户的重要载体。
未来可能出现的发展方向包括:
- 多模态交互融合:结合语音、视觉、触觉等多种感知方式
- 分布式协作:多个智能体协同完成复杂物理任务
- 自适应学习:系统能够根据环境变化自主调整行为策略
- 标准化接口:建立统一的实体交互协议标准
这种技术演进将推动AI从纯粹的软件工具转变为能够主动参与物理世界改造的智能伙伴。元萝卜作为先行者,其发展路径将为行业提供重要参考。
产业影响分析
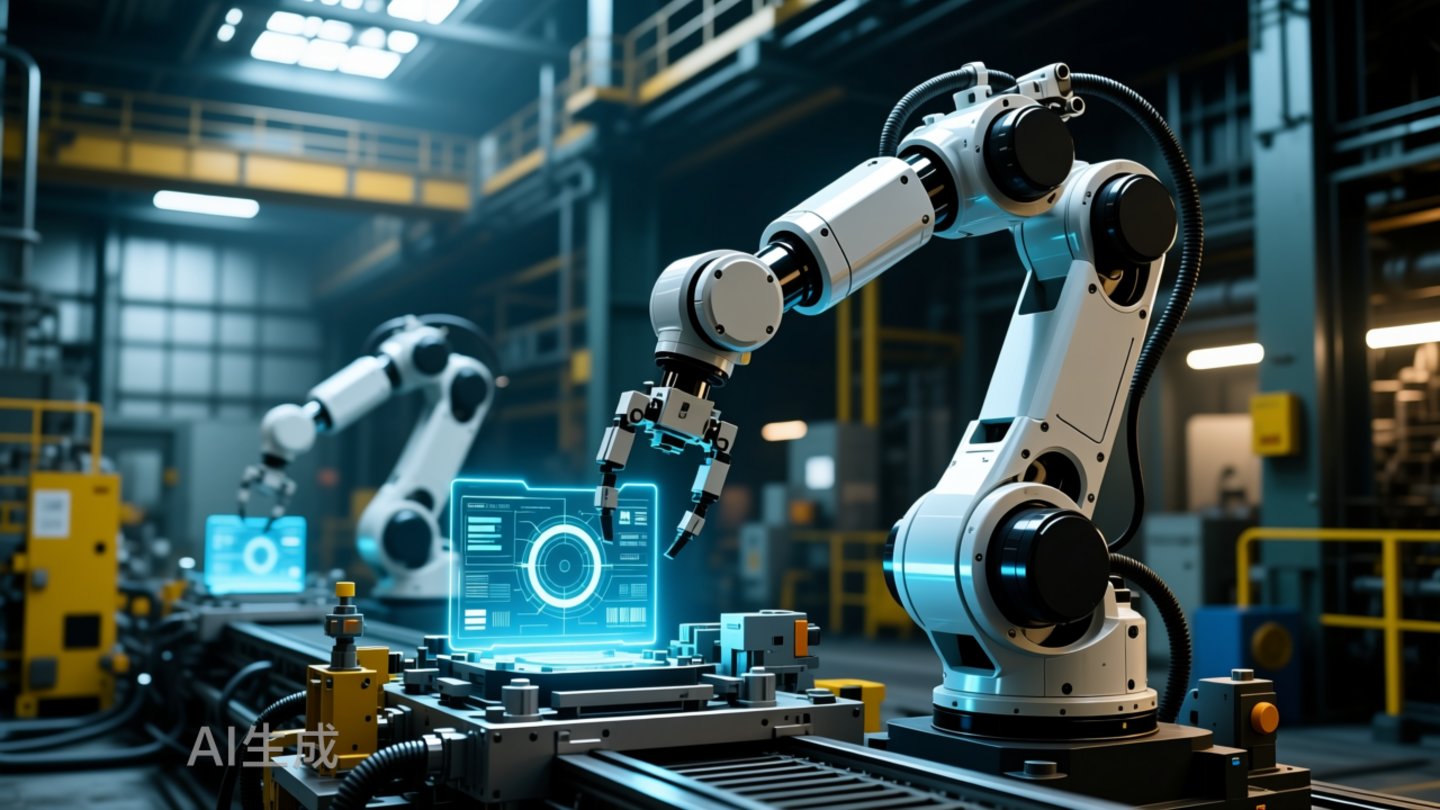
实体交互技术的成熟将对多个产业产生深远影响。在智能制造领域,柔性生产线可以通过AI智能体实现更高效的物料处理;在医疗康复领域,辅助机器人能够提供更精准的物理治疗;在教育培训领域,动手实践类课程将获得全新的教学工具。
元萝卜的成功实践表明,消费级实体交互设备已经具备商业化落地的条件。随着成本进一步降低和功能持续完善,这类产品有望进入更多家庭和办公场景。
未来,随着技术瓶颈的突破和应用场景的拓展,实体交互AI将成为连接数字世界与物理世界的重要桥梁,推动人机协作进入新的发展阶段。