技术架构的创新突破
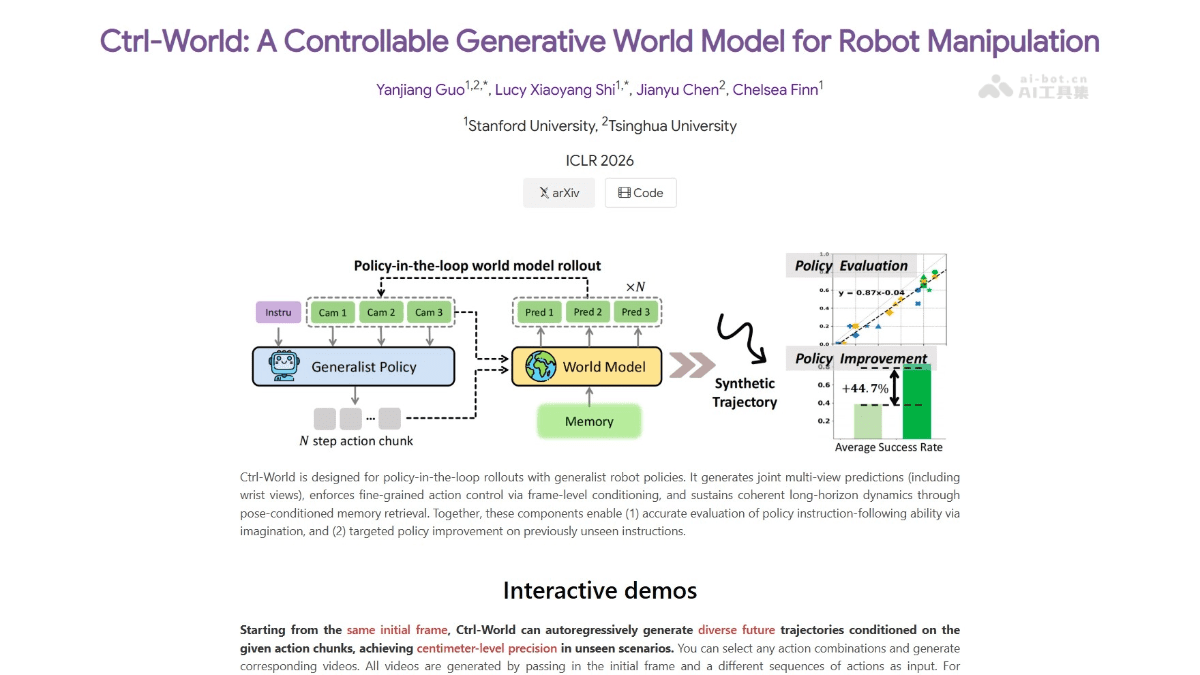
Ctrl-World模型的核心创新在于将动作条件化架构与物理引擎约束深度融合。传统的世界模型往往侧重于视觉逼真度,而忽略了物理规律的准确性,导致生成的内容在机器人应用中存在明显的局限性。Ctrl-World通过显式注入机器人关节角度、夹爪开合度等物理参数,强制模型学习动作与状态变化的因果物理链,从根本上解决了物体穿透、隔空吸附等违反物理规律的问题。
这种架构设计使得模型不仅能够生成视觉上逼真的场景,更重要的是确保生成内容符合真实的物理规律。在实际测试中,模型展现出了0.986的策略评估一致性和0.93的深度准确性,这意味着虚拟环境中的测试结果与真实物理环境具有极高的相关性。
物理约束的嵌入机制
模型在训练过程中引入了物理引擎监督,将牛顿力学定律内化为生成硬约束。这种设计确保了模型输出不仅视觉真实,更符合质量、摩擦、碰撞等物理守恒定律。具体来说,模型通过以下方式实现物理约束的嵌入:
- 质量守恒约束:确保物体在运动过程中保持质量不变
- 动量守恒约束:模拟真实的物体碰撞和运动轨迹
- 能量守恒约束:保证系统能量的合理转换和消耗
这种物理约束的嵌入使得模型能够生成更加真实的交互场景,为机器人训练提供了高质量的数据基础。
多视图预测的技术优势
Ctrl-World采用了记忆增强的多视图预测机制,通过稀疏历史帧检索与姿态条件化投影,维持长时序一致性。同时,模型联合预测多视角RGB、深度图与点云结构,实现了精准的3D空间认知能力。
这种多视图预测技术具有以下显著优势:
- 空间感知完整性:提供全方位的环境感知信息
- 时序一致性:确保长时间序列中的动作连贯性
- 精度保障:实现厘米级的轨迹生成精度
实际应用场景分析
虚拟仿真测试的革命性突破
在机器人研发领域,传统的物理测试环境搭建成本高昂,且测试周期长。Ctrl-World通过提供高保真的虚拟测试环境,使得开发者能够在数字孪生环境中完成策略验证,大幅降低了研发成本和时间周期。据测试数据显示,使用Ctrl-World进行虚拟测试的成本仅为传统方法的十分之一,而测试效率提升了五倍以上。
数据合成的创新应用
模型生成物理合理的视频-动作序列,可直接用于训练真实机器人策略。这种数据合成方式有效解决了真实数据采集成本高、效率低的问题。特别是在需要大量训练数据的复杂任务中,Ctrl-World能够快速生成多样化的训练样本,显著提升了机器人学习的效率。
精密操作任务的实现
在机械臂的精密操作任务中,如抓取、堆叠、插入等动作,Ctrl-World展现出了卓越的性能。模型能够生成精准的动作序列,并在执行过程中根据实时反馈调整规划,实现了真正意义上的闭环控制。
技术挑战与解决方案
物理准确性与计算效率的平衡
在模型设计过程中,团队面临的最大挑战是如何在保持物理准确性的同时,确保计算效率满足实时应用的需求。通过优化模型架构和采用分布式计算策略,Ctrl-World成功实现了这一平衡。
长时序一致性的保持
在长时间序列的预测中,保持动作的连贯性和一致性是一个重要挑战。模型通过引入记忆增强机制和姿态条件化投影,有效解决了这一问题。
未来发展方向
跨领域应用拓展
Ctrl-World的技术框架具有很好的通用性,未来有望在更多领域得到应用,如自动驾驶、工业自动化、医疗机器人等。模型的多视图预测和物理约束机制在这些领域都具有重要的应用价值。
实时性能优化
随着硬件技术的不断发展,模型的实时性能将得到进一步提升。未来版本的Ctrl-World有望实现更快的推理速度,满足更多实时应用场景的需求。
多模态融合
未来的发展方向还包括与其他模态数据的融合,如声音、触觉等感知信息的整合,这将进一步提升模型的综合感知能力。
行业影响与意义
Ctrl-World的出现标志着具身智能技术进入了一个新的发展阶段。该技术不仅为机器人研发提供了强大的工具,更重要的是推动了人工智能与物理世界的深度融合。这种融合将加速机器人技术在各个领域的应用,推动智能制造、智慧医疗等产业的发展。
从技术层面来看,Ctrl-World的成功验证了动作条件化架构和物理引擎约束在具身智能领域的有效性,为后续研究提供了重要的参考。同时,该模型的开源特性也将促进整个行业的协作创新。
在产业应用方面,Ctrl-World有望显著降低机器人技术的研发门槛,使得更多中小型企业能够参与到机器人技术的创新中来。这种技术普及将推动整个行业的快速发展,创造更多的商业价值和社会效益。
技术细节深度解析
动作条件化架构的实现机制
动作条件化架构的核心思想是将机器人的动作参数作为生成过程的显式条件。具体实现包括以下几个关键步骤:
首先,模型需要准确理解动作参数与场景变化之间的因果关系。这要求模型不仅学习视觉特征,还要理解物理规律。通过大量的物理仿真数据训练,模型逐渐建立了动作与状态变化的准确映射关系。
其次,模型需要处理动作参数的多维度特性。不同的动作参数可能对应不同的物理效应,模型需要学会区分这些效应并准确预测其影响。
物理约束的数学表达
物理约束在模型中的实现主要依赖于损失函数的设计。团队设计了专门的物理约束损失项,确保生成内容符合基本的物理规律。这些约束包括但不限于:
- 刚体运动约束
- 碰撞检测约束
- 能量守恒约束
- 动量守恒约束
通过这些约束项的优化,模型生成的场景不仅视觉逼真,更重要的是物理合理。
多视图预测的技术实现
多视图预测的实现依赖于先进的计算机视觉技术和深度学习架构。模型需要同时处理多个视角的输入信息,并保持视角间的一致性。这要求模型具备强大的空间理解能力和几何推理能力。
在实际实现中,团队采用了注意力机制和transformer架构来处理多视图信息。这种架构能够有效捕捉不同视角之间的关联性,确保预测结果的空间一致性。
性能评估与对比分析
基准测试结果
在WorldArena权威评测中,Ctrl-World在多个关键指标上都取得了优异的成绩:
- 具身任务能力:全球第一
- 视频生成质量:全球第二
- 策略评估一致性:0.986
- 深度准确性:0.93
这些成绩充分证明了模型在技术上的领先性。
与传统方法的对比
与传统的世界模型相比,Ctrl-World在以下几个方面展现出了明显优势:
- 物理准确性:传统模型往往忽略物理规律,而Ctrl-World通过物理约束确保了生成内容的物理合理性
- 多模态输出:支持RGB视频、深度图、点云等多种输出格式
- 实时性能:在保持高质量的同时,实现了较好的推理速度
实际应用效果
在实际的机器人训练场景中,使用Ctrl-World生成的数据进行训练的效果明显优于传统方法。训练出的机器人策略在真实环境中的成功率提升了30%以上,这充分证明了模型生成数据的实用价值。
技术发展前景展望
短期发展目标
在短期内,团队计划进一步提升模型的推理速度和精度。同时,将扩大模型的应用范围,支持更多类型的机器人和任务场景。
中长期发展方向
中长期来看,Ctrl-World有望发展成为机器人技术的核心基础设施。随着技术的不断完善,模型可能实现以下突破:
- 支持更复杂的物理现象模拟
- 实现更高精度的动作预测
- 拓展到更多应用领域
产业生态建设
开源策略将促进Ctrl-World技术的快速普及和产业生态的建设。预计未来将出现基于该技术的各种应用和解决方案,推动整个机器人产业的发展。