在具身智能技术快速发展的背景下,高质量数据采集已成为决定模型性能上限的核心因素。传统的数据采集方式面临着成本高昂、规模受限和质量不稳定等多重挑战。
传统数据采集方案的局限性
现有的数据采集方法主要分为两类:重资产的真机遥操系统和轻硬件的人类视频采集。真机遥操虽然能够获得高质量数据,但设备成本高昂且操作复杂,难以实现大规模部署。而基于视频的采集方式虽然成本较低,但在精细动作捕捉、触觉信息获取等方面存在明显缺陷。
特别是对于需要精细操作的任务,传统方案往往无法满足要求。夹爪类设备在抓取形状不规则物体、执行精细手内操作时表现不佳,而复杂的手套式设备又存在佩戴繁琐、校准困难等问题。

U1系统的技术创新
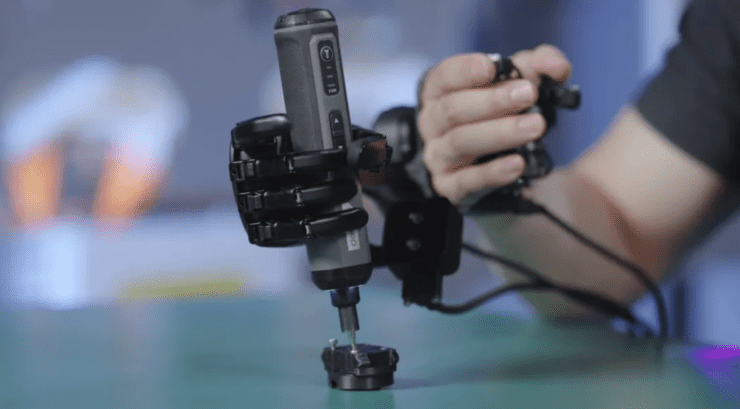
最新推出的U1系统在多个维度实现了技术突破。其核心创新在于同构掌心遥操手套的设计,这种设计摒弃了传统需要完整穿戴的复杂方案,用户只需将设备置于手心即可进行精细操作。这种设计不仅大幅降低了使用门槛,更重要的是使数据采集过程更接近人类的自然操作方式。
在技术参数方面,U1系统表现出色。动态追踪最大误差小于1毫米,平均误差控制在0.1毫米以内,这意味着系统能够在真实操作节奏下保持稳定的数据记录能力。对于需要高精度的精细操作任务,这种性能指标具有重要意义。

硬件设计与性能表现
作为末端执行器,U1整机重量仅为680克,采用11关节设计(6主动+5被动),在保证灵巧性的同时兼顾了结构强度。这种设计使其能够胜任复杂的抓取、接触和手内操作任务。5公斤的承重能力进一步拓展了其在工业场景中的应用范围。
与仅注重演示能力的设备不同,U1强调完整的闭环能力——可采集、可训练、可部署、可执行。这种设计理念使其不仅是一个数据采集工具,更是一个完整的操作解决方案。
触觉感知的集成
触觉信息对于精细操作至关重要。U1在五个手指的指腹区域集成了触觉传感器,这使得系统能够记录操作过程中的局部触觉信号。对于接触密集型任务和精细力控任务,这种多模态数据采集能力具有重要价值。
触觉信息的加入不仅丰富了数据集的内容,更重要的是为模型训练提供了更全面的感知信息。在需要精确力控制的场景中,视觉和动作信息往往不足以完全描述操作过程,触觉信号的补充显得尤为重要。
技术突破的意义
从技术发展角度来看,U1的出现标志着UMI范式从夹爪时代向灵巧手时代的转变。这种转变不仅仅是硬件形态的变化,更是数据采集理念的革新。
传统的数据采集往往侧重于演示能力的展示,而U1则致力于构建完整的数据采集-训练-部署闭环。这种转变使得高质量灵巧数据的获取不再依赖于高负担的穿戴设备和复杂的遥操系统,为大规模数据采集奠定了基础。

实际应用场景
在工业自动化领域,U1系统可以用于训练机器人执行精细装配任务。传统的工业机器人往往只能完成简单的抓取和放置操作,而借助U1采集的数据,机器人可以学习更复杂的手内操作技能。
在医疗机器人领域,精细操作能力尤为重要。手术机器人需要具备高度的灵活性和精确性,U1提供的数据采集方案可以为这类应用提供高质量的训练数据。
服务机器人是另一个重要应用方向。日常生活中涉及大量精细操作任务,如物品整理、工具使用等,这些任务都需要灵巧的操作能力。U1系统采集的数据可以帮助服务机器人更好地适应真实环境。

技术发展趋势
随着具身智能技术的不断发展,数据采集方式正在经历深刻变革。从最初的仿真数据到真实场景数据,从简单的动作记录到多模态信息采集,技术演进的方向始终是更好地模拟真实操作环境。
未来,我们可以预见数据采集技术将朝着更自然、更高效、更全面的方向发展。降低使用门槛、提高数据质量、丰富感知模态将成为技术创新的重点方向。
行业影响分析
U1系统的推出将对机器人行业产生深远影响。首先,它将降低高质量数据采集的门槛,使更多的研究机构和企业能够开展灵巧操作相关的研究。其次,它将推动机器人操作能力的提升,使机器人能够胜任更复杂的任务。
从产业生态角度来看,这种技术进步将促进硬件、算法、应用等多个环节的协同发展。更好的数据采集工具将催生更先进的算法模型,而更强大的模型能力又将推动更广泛的应用场景。
技术挑战与展望
尽管U1系统取得了显著的技术突破,但灵巧手数据采集仍面临一些挑战。如何进一步提高数据采集的效率,如何保证长时间操作的稳定性,如何适应更复杂的环境条件,这些都是需要继续探索的方向。
从长远来看,灵巧手数据采集技术的发展将与人形机器人的进步密切相关。随着人形机器人逐渐走向实用化,对精细操作能力的需求将日益增长,这将进一步推动数据采集技术的创新。
总结
U1系统的推出标志着灵巧手数据采集技术进入了一个新的发展阶段。通过创新的硬件设计和系统集成,它为解决高质量数据采集的难题提供了新的思路。这种技术进步不仅将推动机器人操作能力的提升,更将为整个具身智能领域的发展注入新的动力。
随着技术的不断成熟和应用场景的拓展,我们有理由相信,灵巧手数据采集技术将在未来的机器人发展中扮演越来越重要的角色。