在自动驾驶技术快速发展的今天,理想汽车推出的MindVLA-o1代表了行业向通用具身智能体演进的重要里程碑。这一原生多模态架构的创新之处在于,它打破了传统自动驾驶系统中各模块独立设计的局限,将视觉感知、语言理解和行为决策统一在一个完整的框架内。
技术架构的突破性创新
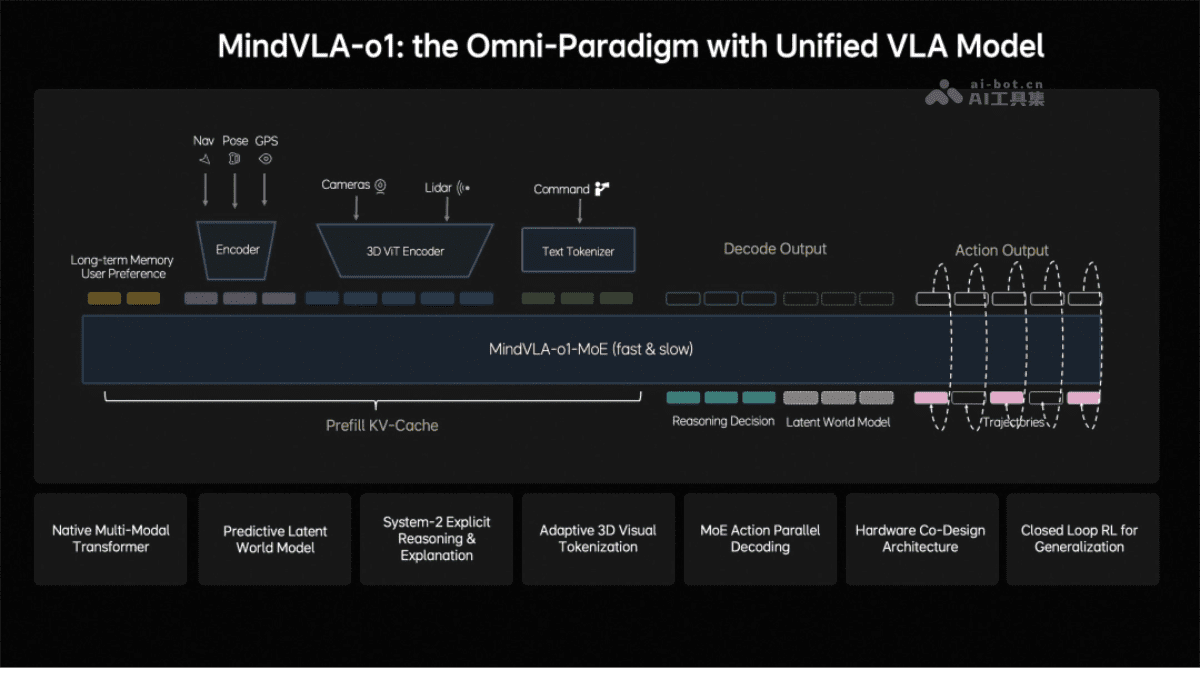
传统自动驾驶系统通常采用分模块设计,感知、预测、规划等环节相对独立,这种设计虽然便于模块化开发,但在信息传递和决策一致性方面存在天然缺陷。MindVLA-o1通过原生多模态架构实现了端到端的统一优化,这种设计理念的转变标志着自动驾驶技术进入了新的发展阶段。
3D空间感知能力的提升是该模型的核心优势之一。通过3D ViT编码器与前馈式3DGS表示,模型能够精准理解场景中的静态环境与动态物体。相比传统的BEV(鸟瞰图)感知方案,3D空间感知能够更好地保留场景的三维几何信息,为后续的决策规划提供更丰富的环境上下文。
多模态推理的深度融合
隐世界模型的引入是MindVLA-o1的另一大创新点。该模型在紧凑的隐空间中进行高效预测,避免了直接生成未来图像的高计算成本。这种设计使得模型能够在理解当前场景的基础上,"想象"未来的可能发展,实现理解当前与预测未来的统一。
从技术实现角度看,隐世界模型经过三阶段训练构建未来场景的隐空间表征与推演能力。第一阶段专注于基础表征学习,第二阶段引入时间维度进行序列预测,第三阶段则结合具体任务进行微调优化。这种渐进式的训练策略确保了模型在不同层次上都具备良好的泛化能力。
实时决策的技术保障
在行为生成方面,MindVLA-o1采用VLA-MoE架构与并行解码机制,生成符合动力学约束的高精度驾驶轨迹。Action Expert专门处理驾驶轨迹生成任务,采用并行解码一次性输出所有轨迹点,确保满足实时性要求。
离散扩散技术的应用进一步提升了轨迹生成的质量。通过多轮迭代优化,模型能够生成空间连续且符合动力学约束的轨迹。这种技术在处理复杂驾驶场景时表现出色,特别是在需要连续平滑控制的高速公路场景和需要精确控制的城市路口场景中。
闭环学习的系统优化
MindVLA-o1的另一个重要特点是实现了端到端的闭环学习系统。传统的自动驾驶系统往往依赖于大量标注数据的监督学习,而MindVLA-o1通过Feed-forward场景重建与强化学习框架,在仿真环境中持续自我进化。
这种设计突破了真实数据规模限制,使得模型能够在虚拟环境中不断优化性能。统一3DGS渲染引擎与分布式训练框架的结合,实现了低成本高效率的强化学习迭代。从实际效果来看,这种闭环学习系统显著提升了模型在处理长尾场景时的表现。
软硬件协同的设计优化
在部署优化方面,MindVLA-o1基于Roofline模型刻画硬件约束,评估近2000种架构配置寻找精度与延迟的Pareto最优解。研究发现,在端侧场景下更宽更浅的模型架构更为高效,这一发现对自动驾驶模型的硬件部署具有重要指导意义。
软硬件协同设计定律将架构探索周期从数月缩短至数天,大幅提升了模型优化的效率。这种快速迭代能力对于应对快速变化的市场需求和技术挑战至关重要。
行业影响与应用前景
MindVLA-o1的推出不仅对理想汽车自身的自动驾驶技术发展具有重要意义,也对整个行业产生了深远影响。其原生多模态架构为其他厂商提供了新的技术路线参考,可能会推动行业从传统的模块化设计向更统一的架构演进。
从应用扩展性来看,同一套VLA模型可控制车辆与机器人,这表明自动驾驶技术正在向更广泛的物理AI领域扩展。这种通用性设计为未来的智能交通、智能制造等场景提供了技术基础。
技术挑战与发展方向
尽管MindVLA-o1在技术上取得了显著进展,但仍面临一些挑战。首先是模型复杂性与实时性之间的平衡问题,如何在保证性能的同时降低计算开销是需要持续优化的方向。其次是长尾场景的处理能力,虽然闭环学习系统有所改善,但在极端罕见场景下的表现仍需进一步提升。
未来发展方向可能包括模型压缩技术的进一步优化、多任务学习能力的增强,以及与其他AI技术的深度融合。随着计算硬件的不断进步和算法的持续优化,我们有理由相信MindVLA-o1代表的技术路线将在未来发挥更大作用。
产业生态的协同发展
MindVLA-o1的成功离不开完整的产业生态支持。从数据层面看,MindData统一VLA数据引擎为模型提供了持续的数据支持;在算力层面,MindSim可控多模态世界模型与RL Infra强化学习基础设施确保了训练效率;硬件层面则依赖于NVIDIA Drive Orin或Thor平台的高性能计算能力。
这种协同发展模式体现了现代AI技术发展的特点——需要算法、数据、算力等多个环节的紧密配合。未来随着技术的进一步发展,这种产业协同的重要性还将继续提升。
从技术创新到产业落地,MindVLA-o1代表了自动驾驶技术发展的新方向。其原生多模态架构不仅提升了当前自动驾驶系统的性能,更为未来的通用人工智能发展奠定了基础。随着技术的不断成熟和应用场景的扩展,这种创新架构有望在更广泛的领域发挥作用。