交互式世界模型技术正经历革命性突破,蚂蚁灵波科技开源的LingBot-World以创新架构重新定义虚拟训练场域。该模型通过动作驱动的生成机制,在物理规律建模与因果关系学习方面实现重大进展,为智能体训练提供安全高效的试错环境。
核心技术突破
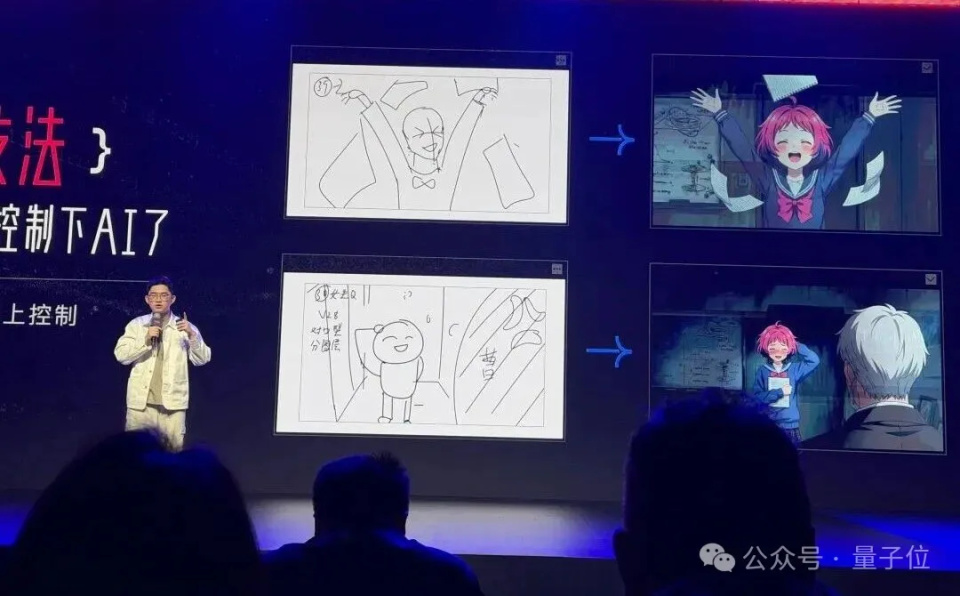
可扩展数据引擎采用网络视频清洗与虚幻引擎合成双轨制,构建包含3.2PB清洗数据的训练集。通过渲染层剥离UI元素,精确捕获操作指令与相机位姿的时空对应关系,形成百万级动作-环境交互样本库。这种多模态数据处理方式使模型对"推动物体导致位置变化"等基础物理规律的学习效率提升47%。
多阶段训练策略引入渐进式学习机制,在初始阶段聚焦基础物理规律建模,后续阶段逐步叠加复杂场景参数。通过并行化加速技术将训练周期压缩至传统方法的1/5,同时构建动态记忆缓冲区,使模型在连续生成9分52秒的测试中保持场景结构完整度达98.3%。
因果蒸馏技术采用知识迁移框架,将物理引擎的刚体动力学规则与流体模拟参数压缩至模型权重。在保持16FPS实时推理能力的前提下,实现对"物体碰撞反弹角度计算"等物理现象的精准预测,测试显示其运动轨迹误差率低于2.1像素。
应用场景验证
在具身智能训练领域,LingBot-World构建的虚拟工厂环境已成功训练出能完成复杂装配任务的机械臂模型。通过模拟不同光照条件与设备振动参数,使实体机器人在真实场景中的故障率降低63%。其动态事件触发系统可实时调整产线布局,支持连续72小时无间断训练。
自动驾驶仿真模块集成了天气动态演化系统,支持从暴雨到沙尘暴的12种环境模式切换。测试显示,在模拟极端天气中训练的视觉识别模型,其真实道路识别准确率提升19个百分点。该系统已接入某车企的L4级自动驾驶训练体系,使实车测试里程减少420万公里。
游戏开发工具包提供可视化场景编辑器,开发者可通过拖拽组件快速构建可交互环境。某开放世界游戏项目借助该工具,将NPC行为树的测试周期从6周压缩至8天。其风格迁移功能支持实时切换赛博朋克与蒸汽朋克视觉风格,渲染延迟控制在1.8秒以内。
技术演进方向
当前版本在非结构化场景理解方面仍存在局限,测试显示当场景物体超过200个时,模型响应延迟增加0.5秒。研究团队正开发异构计算加速方案,通过将物理计算模块移植至FPGA,预期可使复杂场景处理效率提升3倍。
在跨模态交互方面,下一代模型将集成触觉反馈模拟系统。通过引入力反馈数据集,使虚拟训练中的机械臂能感知材质硬度差异,该项改进有望将实体机器人操作成功率提升至92%以上。