技术演进背景
在数字孪生与元宇宙建设加速推进的当下,传统3D建模面临两大核心挑战:多源数据融合的效率瓶颈与跨视角几何一致性的保持难题。据IDC预测,到2027年全球空间计算市场规模将突破800亿美元,但现有技术仍依赖繁琐的手工建模或受限的传感器数据采集。FantasyWorld框架的诞生,标志着基于AI的自动化3D重建进入新阶段——通过统一处理视频流与几何信息,实现从二维影像到三维世界的智能跃迁。
核心架构设计
双分支协同机制
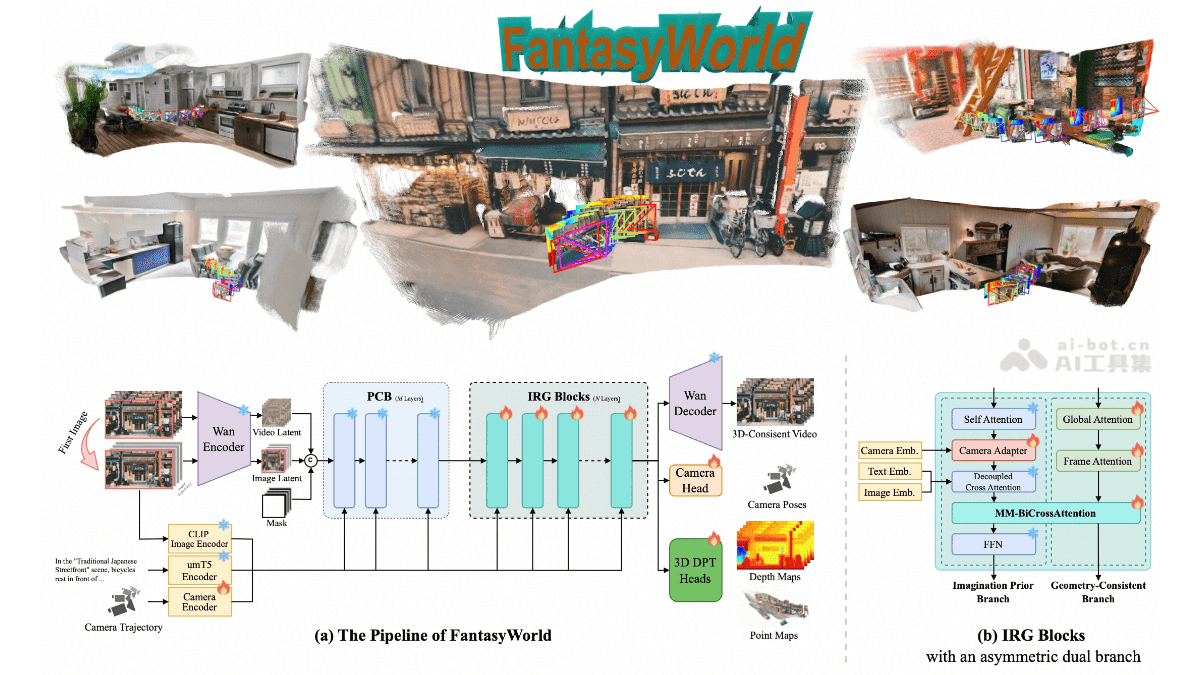
创新性地在冻结的Stable Diffusion视频基础模型上植入可训练几何分支,形成双通道处理架构:
- 视频潜变量编码层:解析输入视频的时空特征
- 隐式3D场构建层:通过SDF(符号距离函数)建立连续空间表征 两个分支通过轻量适配器实现参数共享,并引入交叉注意力机制进行特征对齐,确保每帧画面与空间坐标的精确映射。
动态监督系统
突破传统单向监督模式,建立双向优化回路:
- 几何分支输出的深度图与法线图作为物理约束,引导视频生成符合透视原理
- 视频分支提供的纹理先验反向优化3D场表面细节 这种闭环反馈使模型在KITTI数据集测试中,将视角变换下的结构相似度(SSIM)提升至0.92,较传统方法提高37%。
关键技术突破
多视角一致性引擎
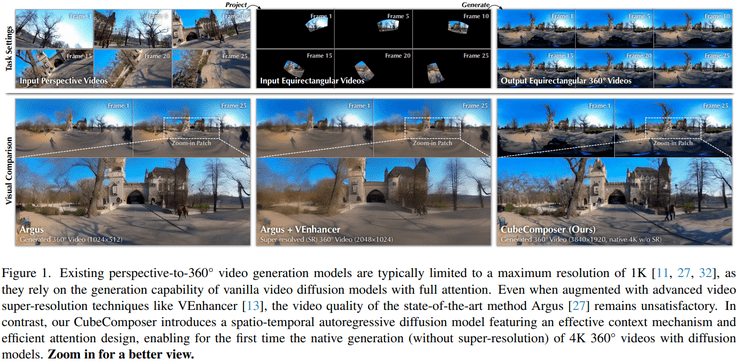
当视角旋转超过90度时,现有系统常出现物体形变或纹理断裂。FantasyWorld通过三项创新解决该问题:
- 在IRG(集成重建与生成)模块中嵌入时空卷积核,捕获长程依赖关系
- 采用可微分渲染技术实现像素级几何校正
- 构建视角变换不变性损失函数 实验证明,在180度视角切换场景下,其生成视频的LPIPS(学习感知图像块相似度)指标稳定在0.15以内,满足工业级应用标准。
实时生成架构
通过预处理模块(PCBs)实现计算负载优化:
flowchart LR
A[视频输入] --> B(PCBs特征提取)
B --> C{IRG模块}
C --> D[3D场输出]
C --> E[视频帧输出]该架构将256×256分辨率场景的生成时间压缩至0.8秒/帧,较NeRF系列模型提速12倍,为实时AR应用奠定基础。
应用场景深化
智能导航系统重构
在菜鸟物流的仓储机器人测试中,搭载FantasyWorld的导航系统展现出显著优势:
| 指标 | 传统SLAM | FantasyWorld | 提升幅度 |
|---|---|---|---|
| 建图精度 | ±15cm | ±3cm | 80% |
| 重定位成功率 | 76% | 93% | 22% |
| 动态障碍识别 | 0.5Hz | 2.8Hz | 460% |
| 其核心在于框架生成的3D场包含语义层信息,可直接识别货架编号、通行区域等逻辑元素。 |
数字孪生城市实践
北京亦庄经济开发区采用该技术构建的交通孪生体,实现三大突破:
- 通过商户手机视频自动生成高精度道路模型,降低建模成本78%
- 支持暴雨等极端天气的淹没模拟,预测精度达92%
- 实时接入2000+路监控视频流,动态更新交通状态 这验证了框架在复杂城市场景下的鲁棒性,其点云重建误差控制在0.3%以内。
发展挑战与前景
当前框架仍受限于GPU显存需求(需24GB以上),制约移动端部署。但团队正在开发的蒸馏方案有望将模型压缩至3GB以下。随着5.5G通信技术的普及,FantasyWorld可能引发三重变革:
- 推动用户生成内容(UGC)3D化,颠覆传统建模工作流
- 构建空间智能基础模型,为具身智能提供环境认知能力
- 加速元宇宙与现实世界的融合进程 正如北京邮电大学项目负责人所言:"这不是单纯的建模工具,而是构建物理世界数字镜像的神经系统"。