技术突破:极致微型化背后的工程挑战
人形机器人在2025年的科技舞台上可谓风头无两。从春晚的舞台表演到演唱会的高难度舞蹈,从工业生产线到服务场景,这些原本只存在于科幻电影中的场景正在加速走进现实。然而,大多数亮相的机器人都是全尺寸的「等身」级别,体积庞大、造价高昂,让普通用户和中小科研团队望而却步。
智元机器人最新发布的Q1,则以背包级的极致体积刷新了行业认知。这并非简单的缩小工程,而是对机器人核心技术的重新架构与优化。在保持全尺寸机器人动力性能的前提下,将整个系统集成到背包大小的空间内,背后是多个技术维度的协同突破。
全身力控技术:小尺寸机器人的核心竞争力
全身力控技术是人形机器人实现复杂交互的关键。不同于传统只控制末端执行器的位置控制,全身力控需要协调机器人全身多个自由度在与环境接触时的力与运动,同时综合考虑平衡、姿态、任务优先级等因素。这种控制方式让机器人不仅能实现「去哪儿」,更要精确掌握「怎么用力」去完成任务。
为实现精准的全身力控,主流设计普遍采用QDD关节作为核心组件。QDD(准直驱)是一种介于传统高减速比伺服驱动与「真正直驱」之间的创新设计,通过使用低减速比的减速结构连接电机和输出轴,结合高扭矩密度电机和低传动比,保留了电机侧的低惯性和良好背驱性,在力量感知、外力互动、动态响应方面展现出明显优势。
微型化的三大技术壁垒
将QDD关节技术应用到小尺寸机器人中,面临着多重技术挑战。首先是高扭矩密度电机的体积压缩难题。电机本身的扭矩密度受电磁材料、磁路尺寸、绕组填充率等物理极限制约,在缩小尺寸时,线圈填铜率下降、散热变困难、磁通密度不足都会导致输出扭矩显著下降。
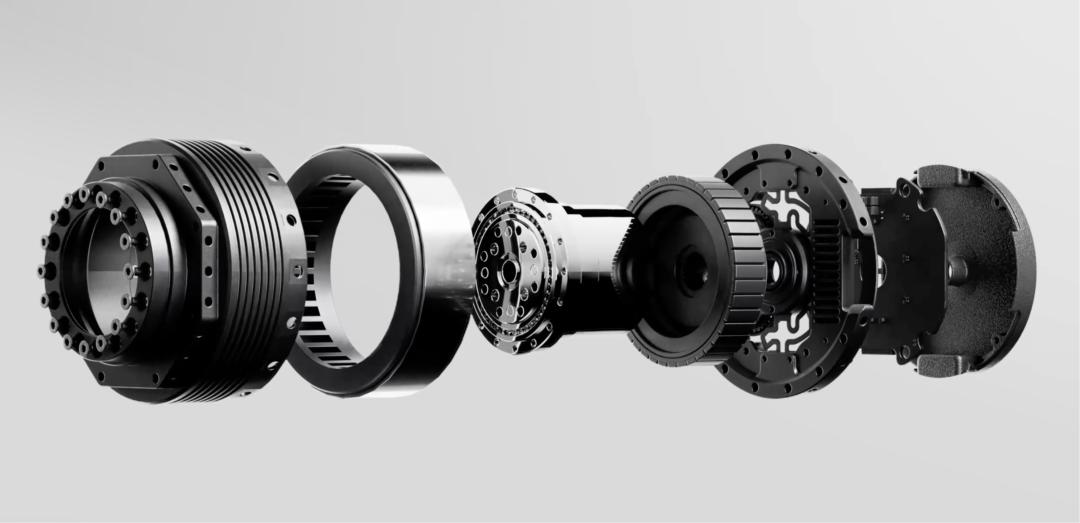
热管理是另一个突出的挑战。高扭矩密度意味着大电流密度,而小体积里的散热条件极其受限。在QDD系统中没有传统高减速比的「缓冲」机制,电机必须自己承担大部分工作负载,这对热管理系统提出了极高要求。此外,小尺寸制造对工艺精度也提出了严苛标准,磁体、绕组、轴承等都需要极高精度,编码器、高性能驱动电子器件则要集成在狭小空间内。
模块化设计:开创个人机器人新时代
Q1采用了创新的模块化硬件设计,支持头部等关键部件的整体更换,配合零门槛的动作编排系统,极大降低了用户的使用门槛。这种设计理念让机器人更像是一个等待提示词的AI实体,用户可以轻松让它在物理世界完成各种任务。

Q1面向高校、创业公司的科研团队,开发工具包和接口完全开放,为具身智能研究提供了低成本实验平台。同时,它也面向硬核潮玩市场,极客们可以利用3D打印技术为其打造专属外观,从猫娘风格到蒸汽朋克风格,外观完全由用户自主决定。这种开源共创的模式,有望催生出丰富的机器人应用生态。
具身智能从工业到个人的跨越
智元机器人成立于2023年2月,在不到三年的时间里估值已达150亿元。今年7月,公司完成对上纬新材的控股,推动上市公司向具身智能机器人领域转型。12月初,智元机器人已实现5000台机器人的量产下线,展现出强大的产业化能力。
Q1的问世,标志着人形机器人正在从工业场景加速走向个人消费市场。未来的AI交互终端可能不再是手机或智能音箱,而是一个「跟你长得很像」的机器人伴侣。随着技术的不断成熟和成本的持续下降,人形机器人有望成为继个人电脑、智能手机之后的下一代个人智能终端。